
Almost too much awesome!
Clearpath Husky

One of the workhorses of the WAVELab, the Clearpath Husky is an easily extensible platform for any kind of ground autonomy. We landed quadrotors on it, mapped building and demonstrated cleaning trajectories with it, and even painted lines.
Clearpath Husky
Other Testimonials

This modified Lincoln MKZ serves as a research platform for WAVELab in collaboration with the Generative Software Development Lab. It is equipped with a drive-by-wire system and numerous sensors including inertial measurement, vision, radar, and lidar.
Autonomoose
( Lincoln MKZ )

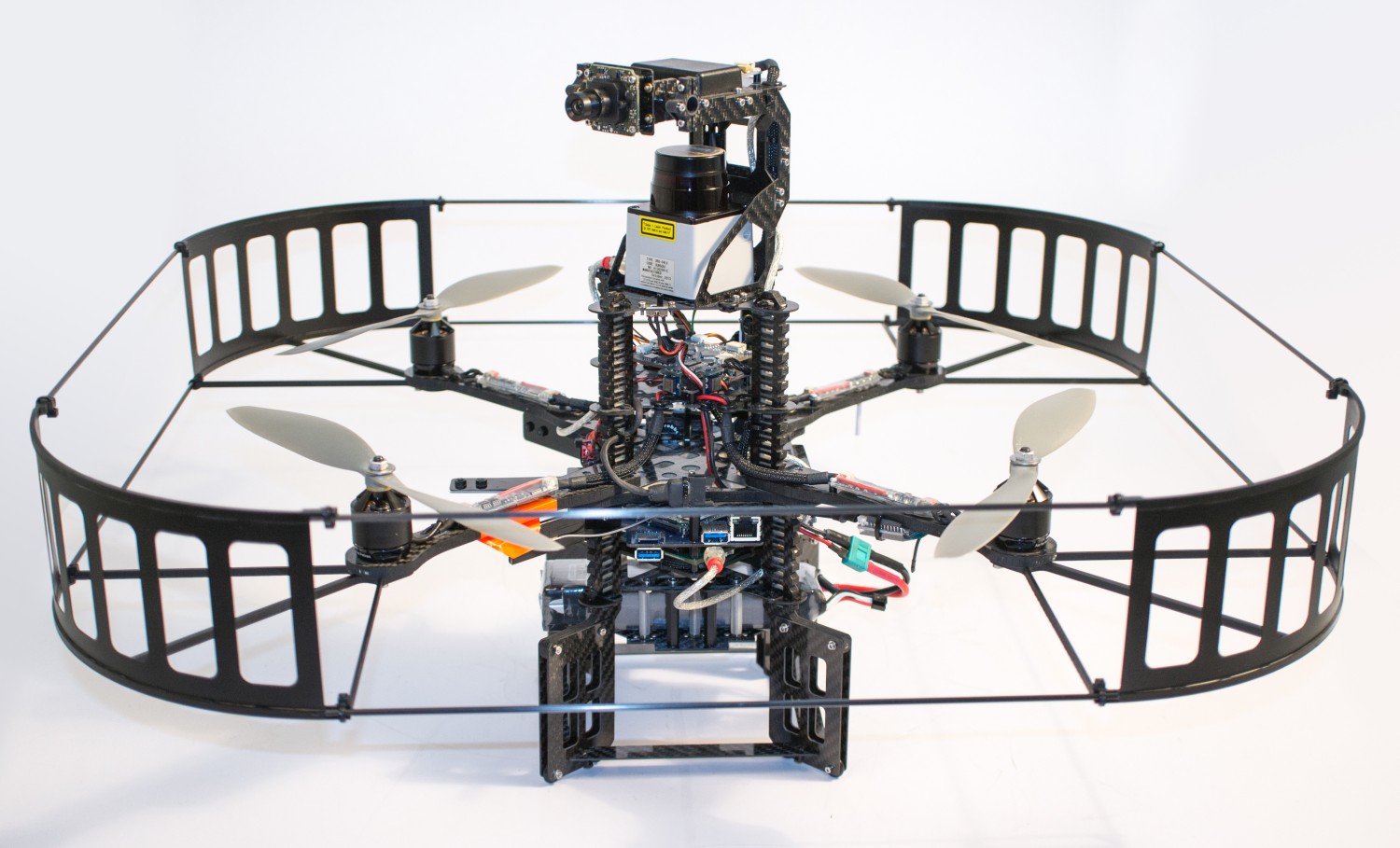
A heavily modified 6 kg S900 platform from DJI, we've added three Ximea USB3.0 cameras with fisheye lenses which can each pump 100 Hz images to an i7 FitPC. We also added RTK-GPS for ground truth on the position of the flyer, and have successfully demonstrated onboard multi-camera parallel tracking and mapping outdoors.
Olga
( DJI Spreading Wings S900 )
The 1.1 kg Pelican is the workhorse of our quadrotor modeling and control group. Easy to modify, and well integrated into our indoor positioning system, we can collect high-quality flight data indoors and out for modeling and control purposes.
Pelicans
( AscTech Pelican Quadrotor )
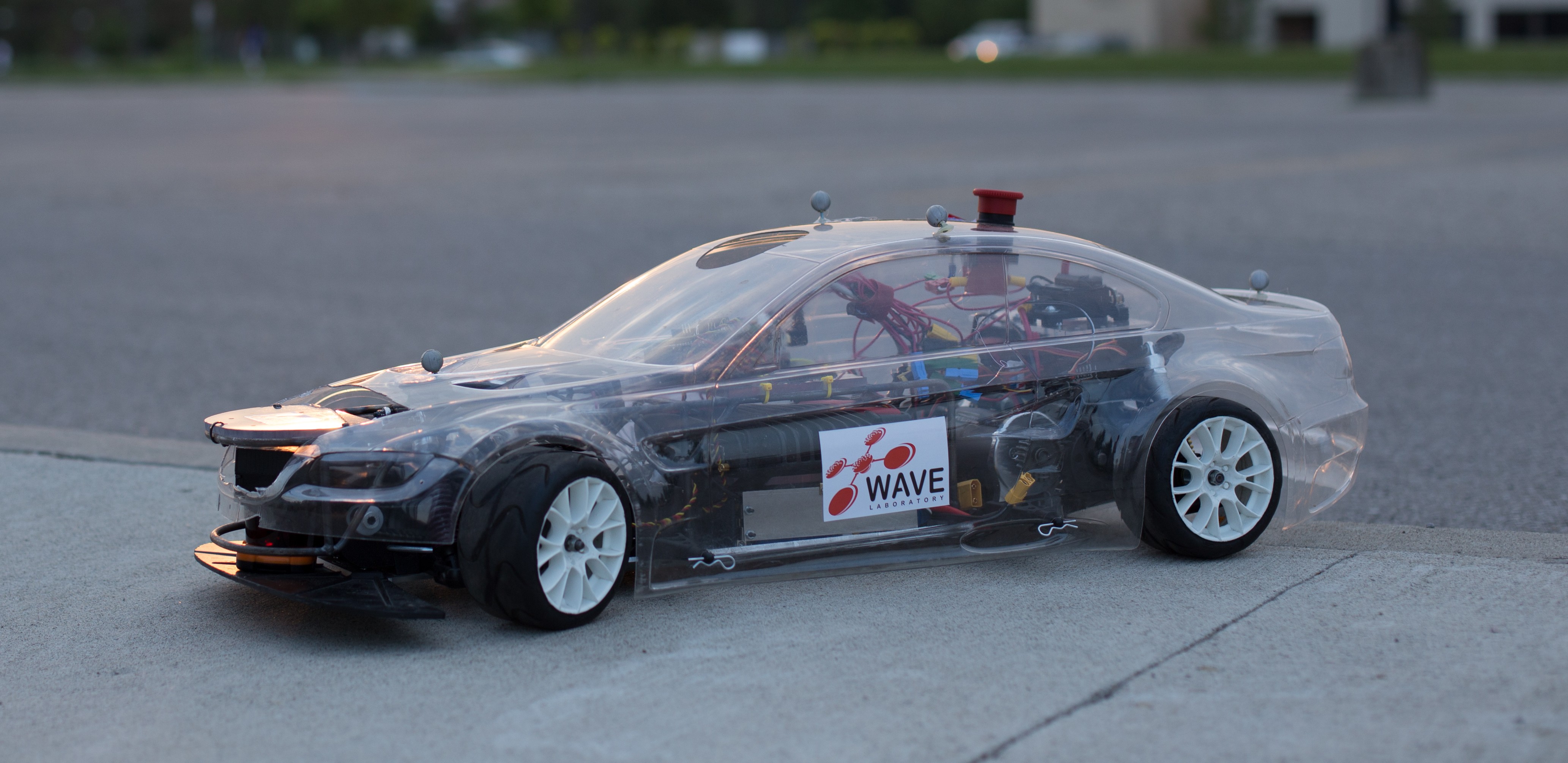
The Multiple Autonomous Robotic Cars IV platform consists of four 1/5th scale self-driving vehicles, capable of speeds up to 100 km/h and sporting a full suite of sensors for scene understanding and collision avoidance. The vehicles weigh roughly 15 kg, and have all necessary computation and emergency systems onboard to be fully autonomous.