
Almost too much awesome!
NASA Sample Return Robot Challenge Rover
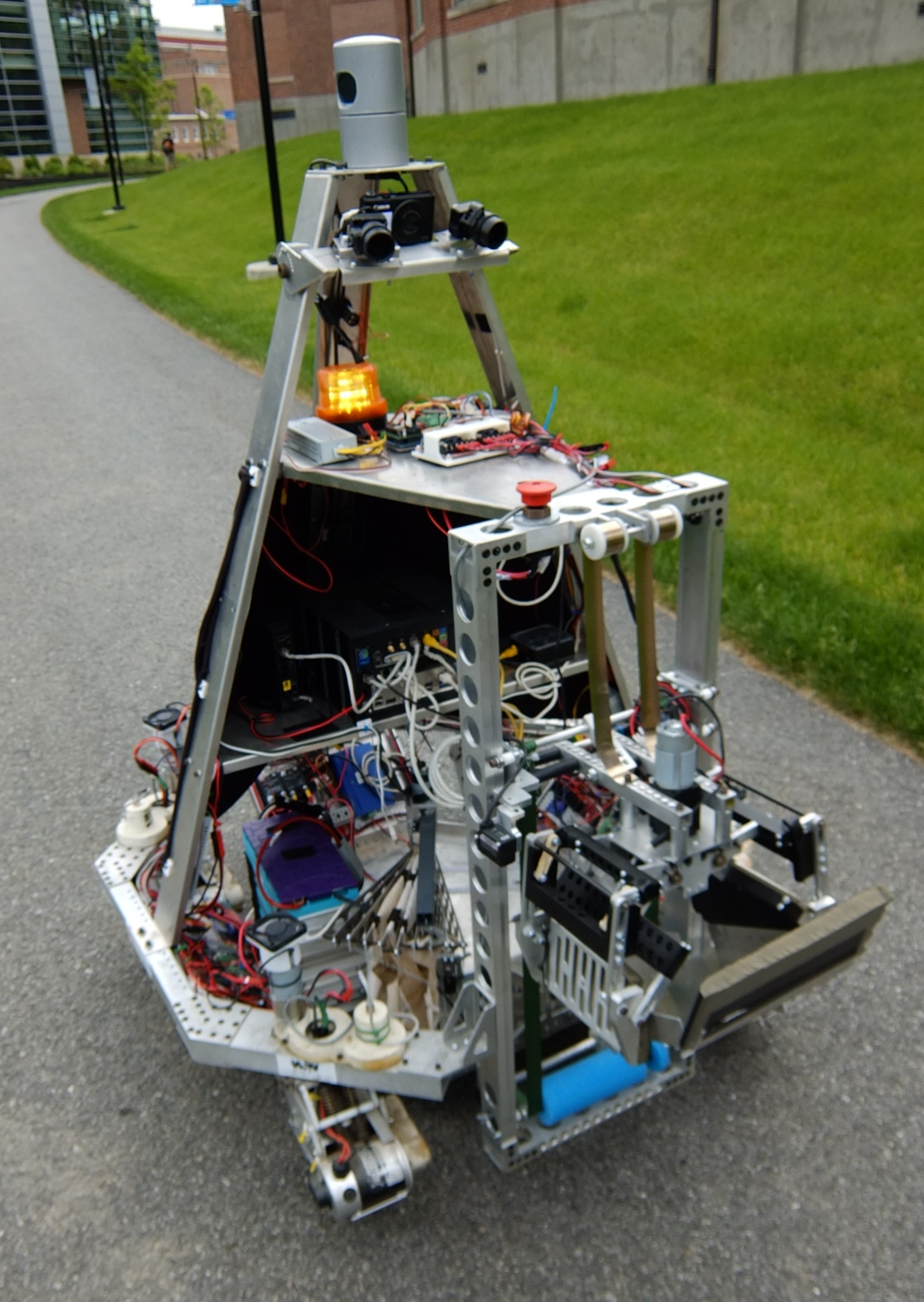
From 2012-2014, the WAVELab built and tested a rover for the NASA Sample return robot challenge, in conjunction with the UW Robotics Team. This beauty could drive for over 2 hours, navigate through unknown forested terrain and parkland, find and collect samples from the ground and plan a complete coverage route through the environment while it explored it.
NASA Sample Return Robot Challenge Rover
Other Testimonials

This modified Lincoln MKZ serves as a research platform for WAVELab in collaboration with the Generative Software Development Lab. It is equipped with a drive-by-wire system and numerous sensors including inertial measurement, vision, radar, and lidar.
Autonomoose
( Lincoln MKZ )

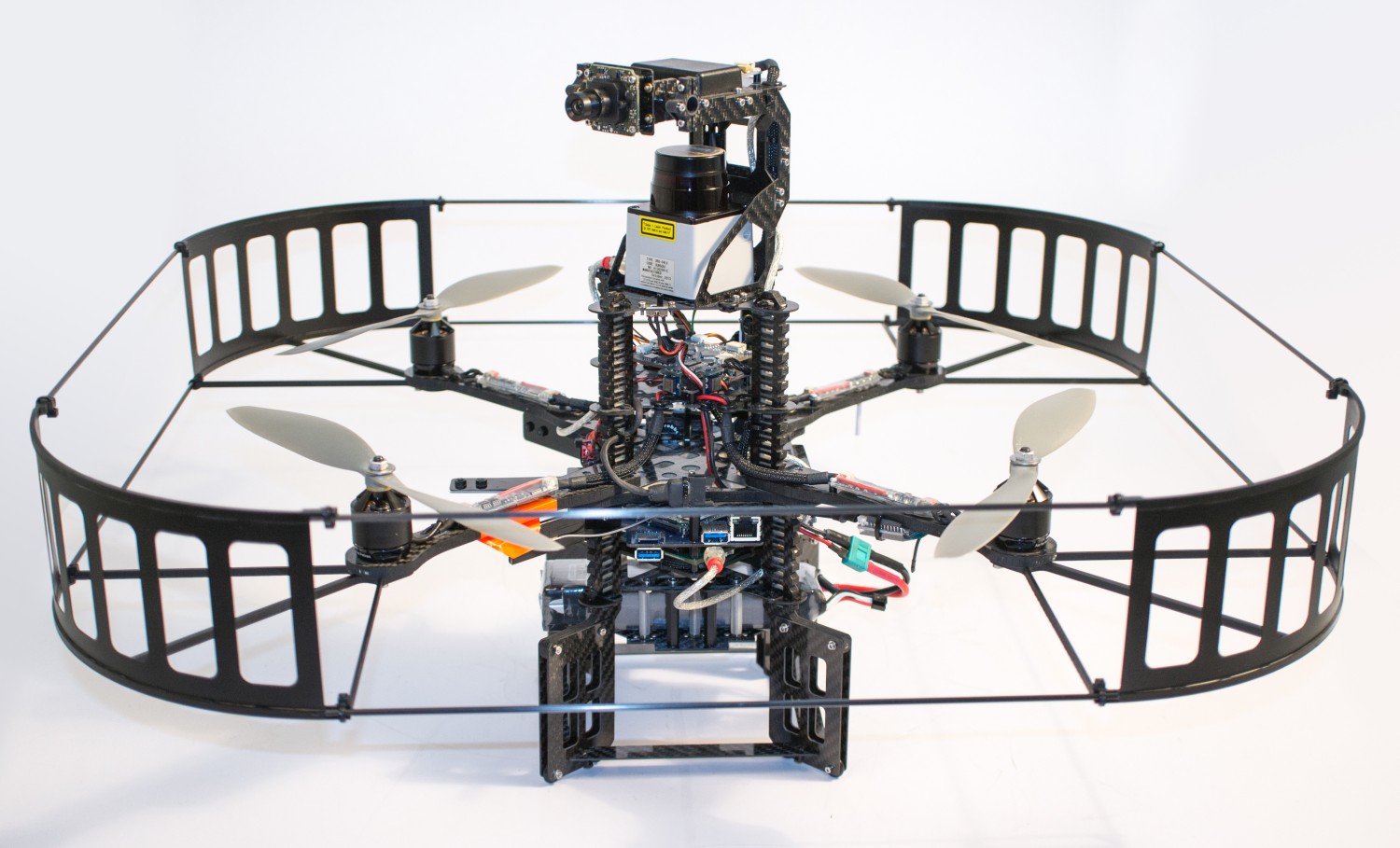
A heavily modified 6 kg S900 platform from DJI, we've added three Ximea USB3.0 cameras with fisheye lenses which can each pump 100 Hz images to an i7 FitPC. We also added RTK-GPS for ground truth on the position of the flyer, and have successfully demonstrated onboard multi-camera parallel tracking and mapping outdoors.
Olga
( DJI Spreading Wings S900 )
The 1.1 kg Pelican is the workhorse of our quadrotor modeling and control group. Easy to modify, and well integrated into our indoor positioning system, we can collect high-quality flight data indoors and out for modeling and control purposes.
Pelicans
( AscTech Pelican Quadrotor )
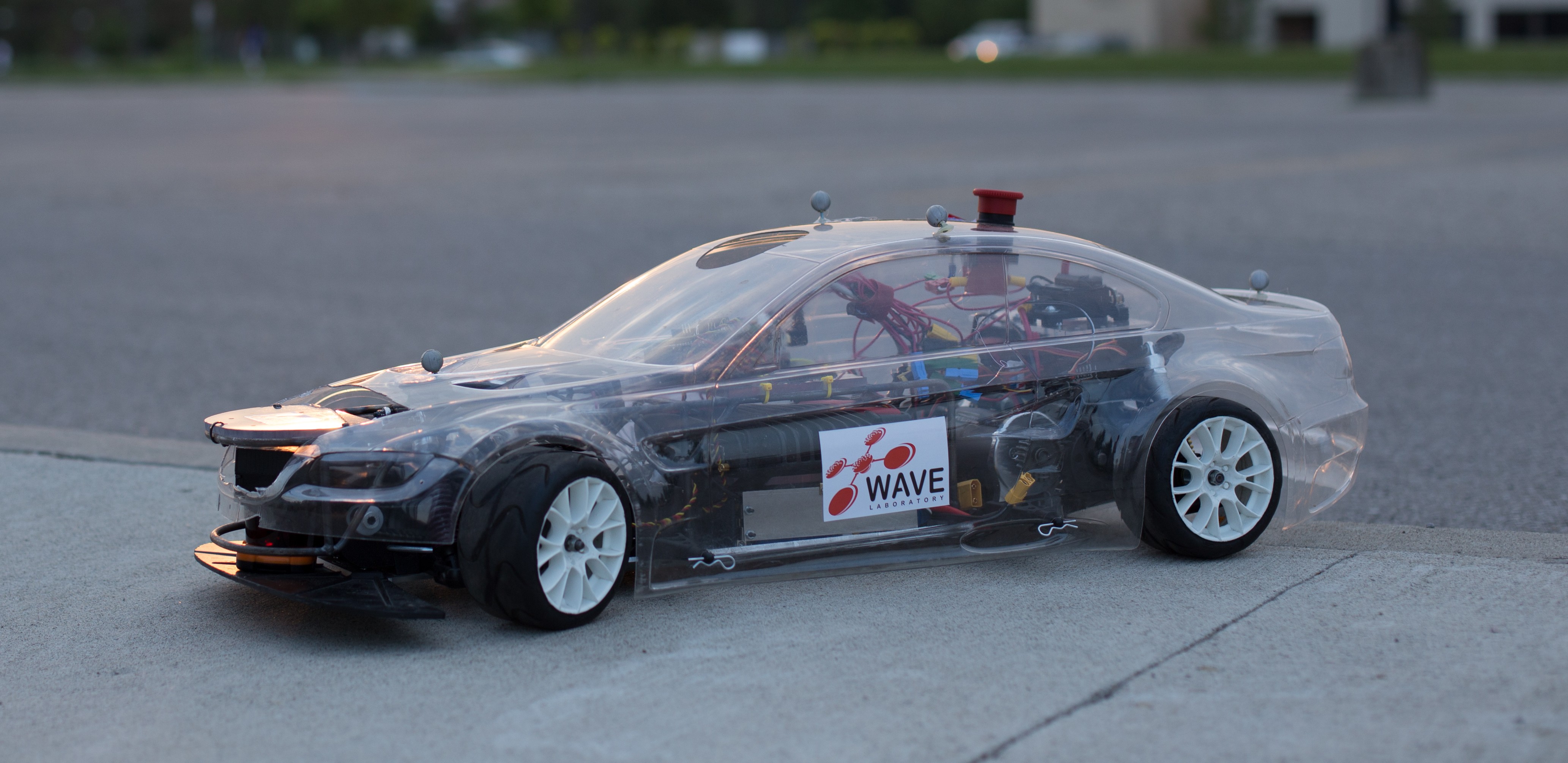
The Multiple Autonomous Robotic Cars IV platform consists of four 1/5th scale self-driving vehicles, capable of speeds up to 100 km/h and sporting a full suite of sensors for scene understanding and collision avoidance. The vehicles weigh roughly 15 kg, and have all necessary computation and emergency systems onboard to be fully autonomous.